
Install Steam
login
|
language
简体中文 (Simplified Chinese)
繁體中文 (Traditional Chinese)
日本語 (Japanese)
한국어 (Korean)
ไทย (Thai)
Български (Bulgarian)
Čeština (Czech)
Dansk (Danish)
Deutsch (German)
Español - España (Spanish - Spain)
Español - Latinoamérica (Spanish - Latin America)
Ελληνικά (Greek)
Français (French)
Italiano (Italian)
Bahasa Indonesia (Indonesian)
Magyar (Hungarian)
Nederlands (Dutch)
Norsk (Norwegian)
Polski (Polish)
Português (Portuguese - Portugal)
Português - Brasil (Portuguese - Brazil)
Română (Romanian)
Русский (Russian)
Suomi (Finnish)
Svenska (Swedish)
Türkçe (Turkish)
Tiếng Việt (Vietnamese)
Українська (Ukrainian)
Report a translation problem












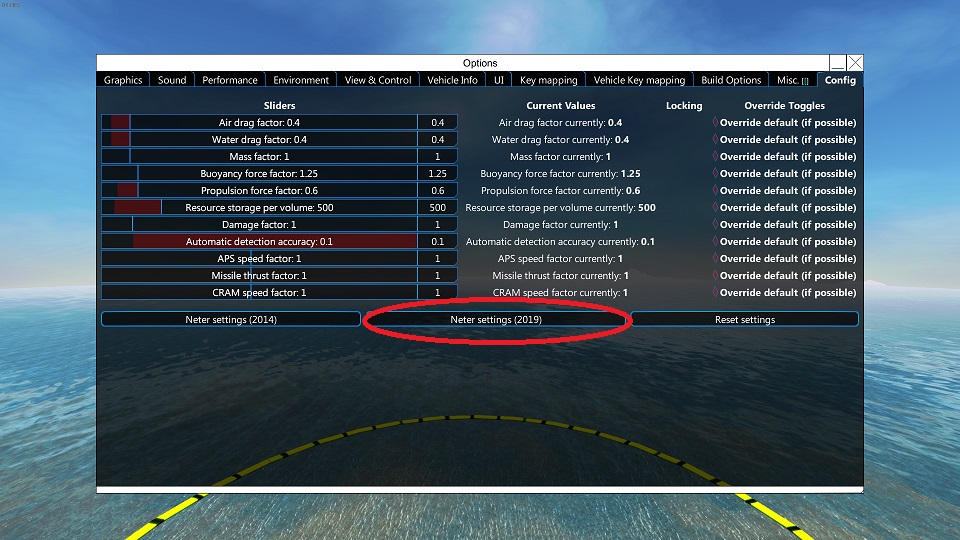




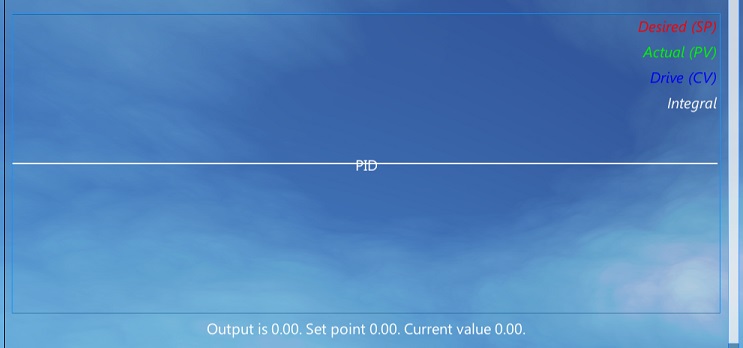
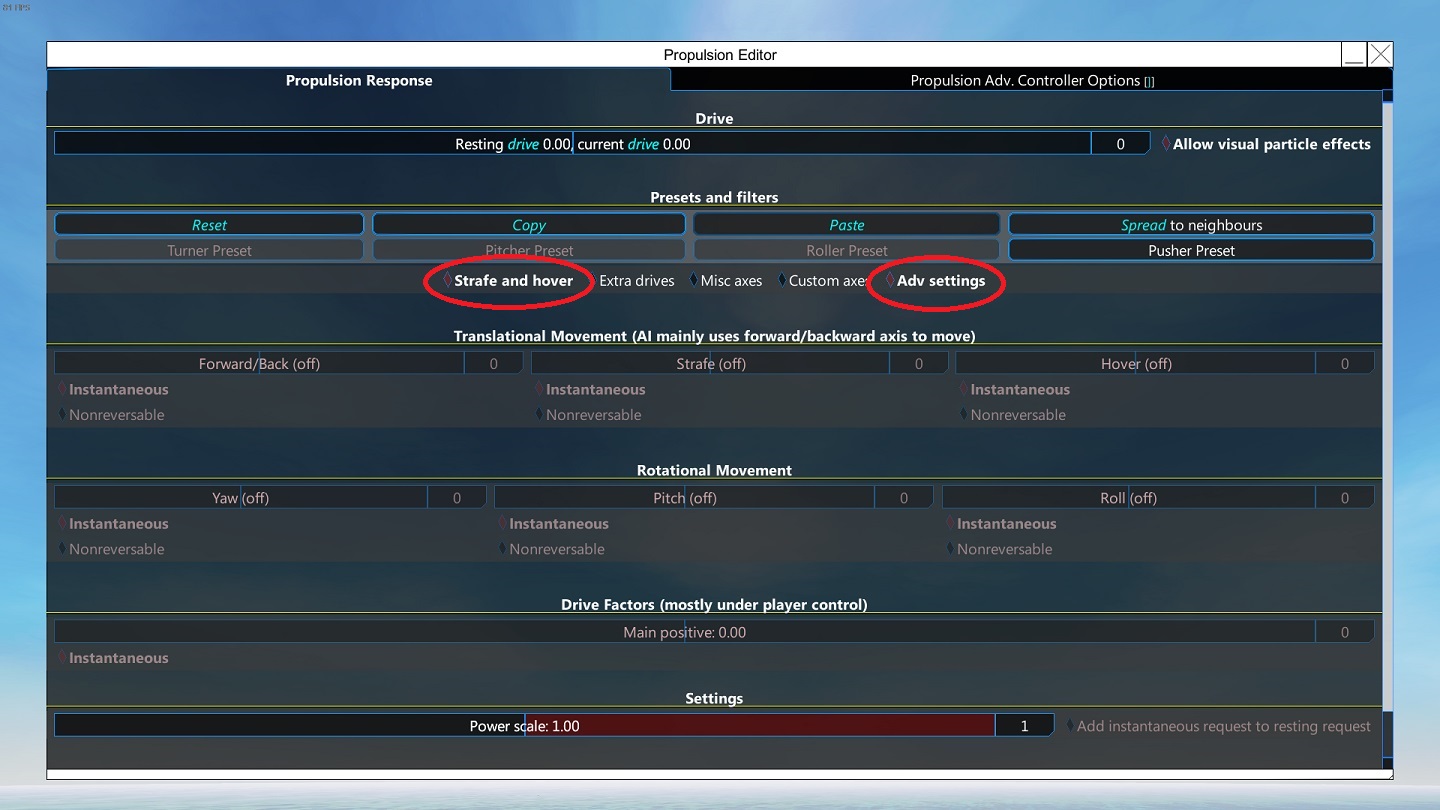



Settings - Integral section: This is mostly wrong. It's common misconception, and it not the worst comparison ever, but it still fails to capture what integral really does.
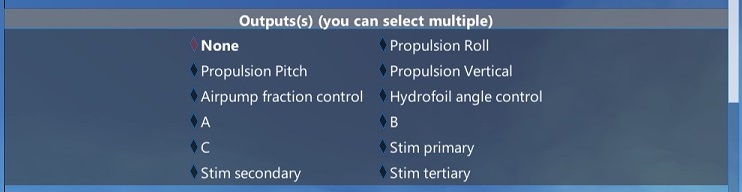
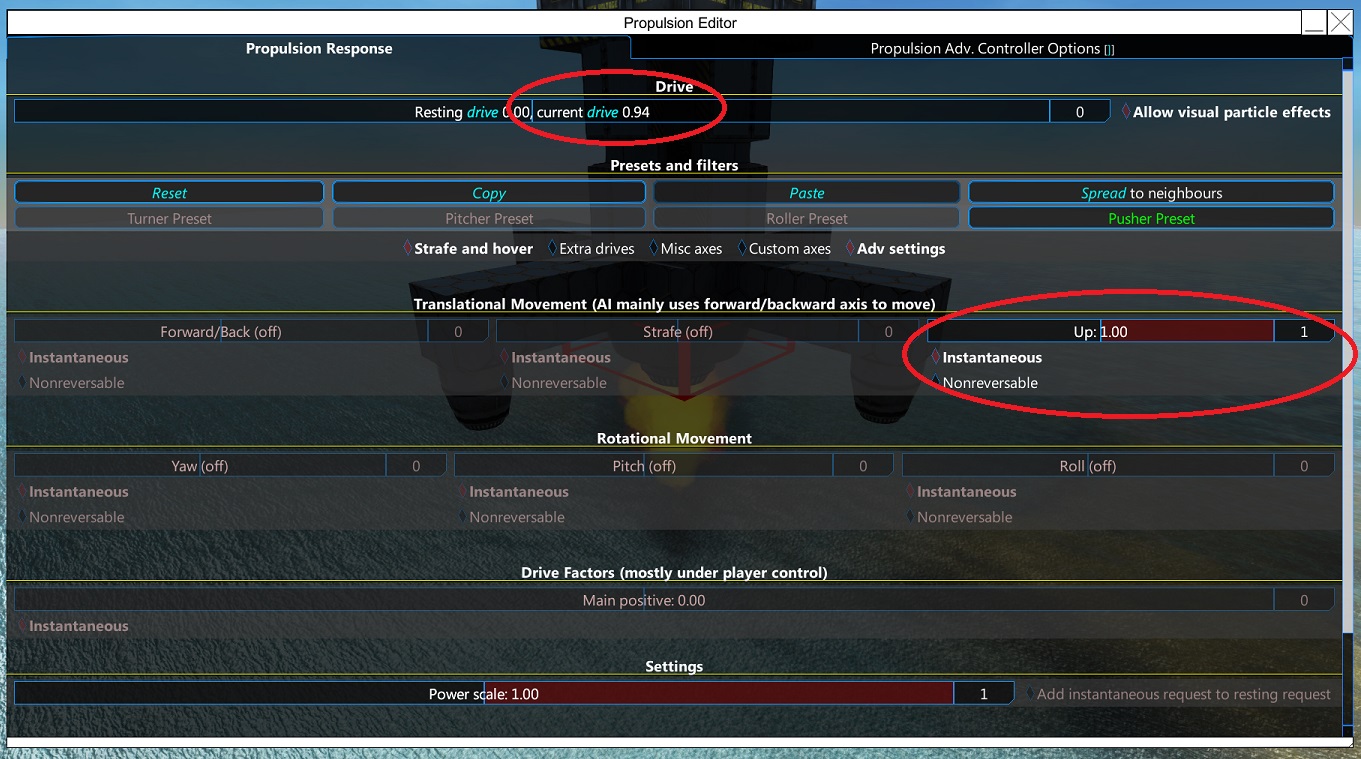
Assigning Propulsion Response section: You don't really have to make sure the total adds up to 1. Just make sure your axis that needs the most power gets bigger numbers and avoid setting any axis to 1 is generally plenty. It's a bit more complicated than that, but it's not a problem at all if numbers add up to more than 1.